
CST無人機RCS仿真實例01 - I求解器仿真雙站RCS
本期簡單研究一下無人機的RCS仿真,選用雷達RCS雙站大尺寸模板:

這期我們只看I-solver:
單位是英尺:
頻率范圍0-0.5GHz,添加0.4GHz遠場和H場:

模板自動添加好平面波并參數化:

導入CAD模型,該模型機翼長116.67英尺,約35米。電尺寸相當于50個波長左右,算是電大尺寸,I-solver合適。

我們就看一個入射方向和極化:

F7或Home界面更新參數:


進入I求解器設置:
我們就用默認設置,開始仿真:


得到遠場結果,這個就是雙站RCS的結果了:
遠場設置欄可以選擇角精度,dB還是線性,RCS的單位:

可以看任意截面的RCS值,比如Theta=30度的截面,這里最大值22.6 dBsm,比三維圖中最大值44.1dBsm小。


仔細看遠場,能判斷不是在Theta=30的截面上:

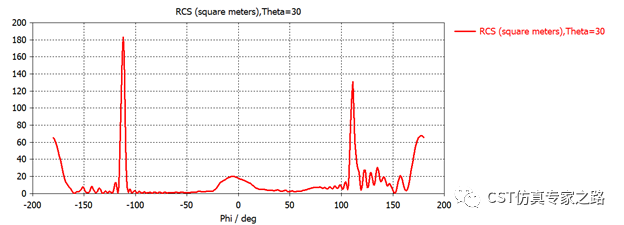
除了遠場視圖查看截面,遠場后處理也可以對截面的RCS值進行提取,比如我們提取線性RCS在Theta=30這個面的1D結果:


Evaluate后處理,得到RCS曲線,這里最大值182,感興趣的朋友換算成dB看看和剛才的一不一樣。
如果單獨把Theta=30,Phil=-45 方向的RCS值提取出來,就是單站RCS了,因為這個方向是平面波入射方向。這就是單站和雙站的區別。
雙站RCS比較簡單,就是遠場結果,各個方向的RCS值。這里我們并沒有深入研究精度,只看流程。
下面我們研究一個情況,如果我們把這個CAD模型,按30:1比例縮小,那么仿真的RCS一樣嗎?稍微了解RCS的朋友肯定知道答案,尺寸越小當然RCS越小。那么,我們可以用縮小的模型計算出原模型的RCS嗎?
同樣流程,我們用另一個CAD的模型,縮小30倍:

如果想在CST中縮小也可以,用Transform –> Scale 。
同樣角度和極化入射平面波:

如果頻率不變,直接仿真,得到的遠場是這樣的:

可見整個RCS值的分布與原模型是不一樣的,也變得很小。
那么如何用縮小的模型計算出原模型的RCS?答案是需要仿真同樣的電尺寸。原模型在0.4GHz的電尺寸等于1/30模型在0.4*30=12GHz的電尺寸,所以我們改監視器頻率:


重新仿真,由于網格設置都不變,都是根據頻率自動剖分的,所以網格數差別不大,計算時間也差不多。

這樣就拿到同樣場型了:

下面我們調整絕對值,還拿Theta=30的截面比較,原模型剛才已經提取了1D RCS 線性曲線了。后處理提取截面RCS:

尺寸縮小30倍,橫截面積縮小900倍,所以我們要將縮小的RCS放大900倍,再和原模型比較。先Evaluate遠場RCS,然后用General1D中的后處理,Y軸放大900倍:

把原模型和小模型結果都拷貝進一個文件夾:

最后觀察表面電流:
原模型0.4GHz:

小模型12GHz:

小結:
1)大尺寸雙站RCS首選I-solver,加遠場監視器就行。
2)決定RCS的因素很多,本案例研究了兩個,絕對尺寸和電尺寸。電尺寸的意思也就是和頻率有關。
3)模型縮小,RCS也縮小,若保持電尺寸相同,也可線性推導計算RCS。




